旋转
怎么找到两个向量之间的旋转?
向量间平分平面上的任意一个向量都可以当做旋转轴。

可以用下面的方法找到两个向量间的最小旋转的旋转轴 u 和旋转角 θ。
u=∣∣a×b∣∣a×b,θ=argcos∣∣a∣∣∣∣b∣∣a⋅b 要怎么旋转一个向量?
可以使用多种方式表示的旋转来完成旋转:
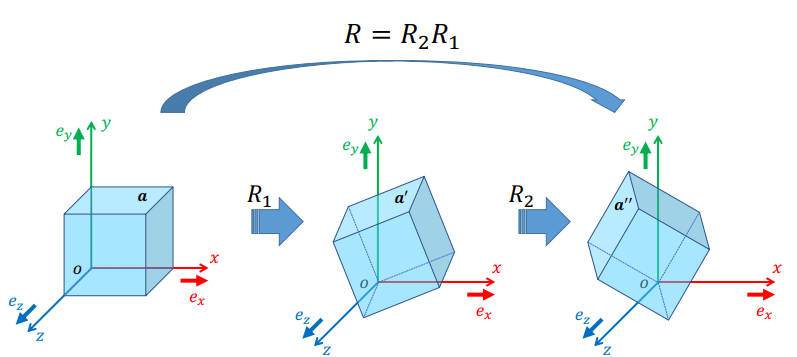
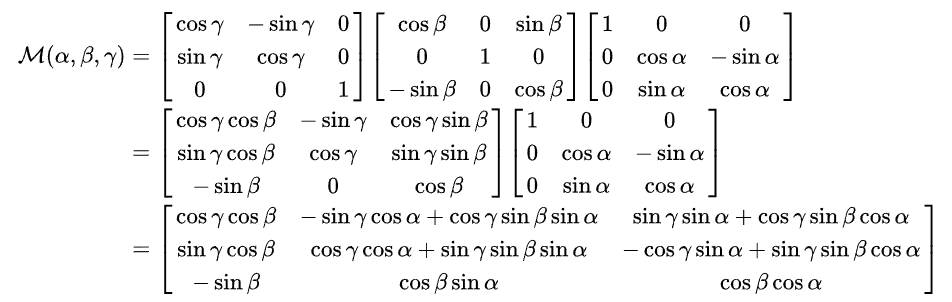
旋转矩阵
旋转矩阵 R 是一个正交矩阵,具有以下特点:
- R−1=RT,RTR=RRT=I
- 旋转矩阵的行列式为1
- 旋转矩阵不改变向量的长度 ∣∣Rx∣∣=∣∣x∣∣
虽然说旋转矩阵中有9个值,但是在考虑到 RTR=I 和 detR=1 带来的约束之后,其实自由度就只剩下3了。
旋转矩阵不能使用 (1−t)R0+tRt 的方式来进行插值。
欧拉角
任何旋转都可以表示为围绕xyz轴(一般指本地坐标系)的旋转的组合。
但是欧拉角的组合非常多,允许xyz不同的顺序,也可以绕相同的轴转多次:XYZ, XZY, YZX, YXZ, ZYX, ZXY, XYX, XZX, YXY, YZY, ZXZ, ZYZ。
但是欧拉角存在一个万向结死锁的问题:当两个本地坐标轴旋转到了平行的状态,那么就会丢失一个自由度。
欧拉角是可以进行线性插值的。
旋转轴、角
使用一个旋转轴 u 和一个旋转角 θ 来表示旋转,具体地:
x′=x+(sinθ)u×x+(1−cosθ)u×(u×x) 旋转角可以非常方便地进行线性插值,但是在计算的时候,代码其实还是要将旋转角和旋转轴转换成矩阵。
四元数
四元数的形式为:q=xi+yj+zk+w,也可以写为:
q=⎣⎡wxyz⎦⎤=[wv] 四元数的运算:
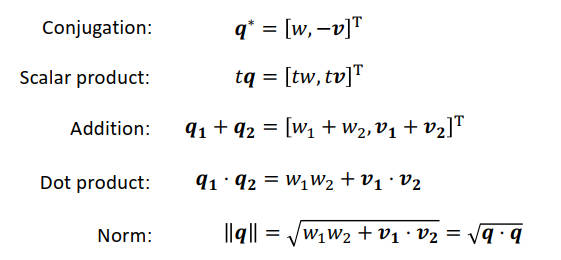
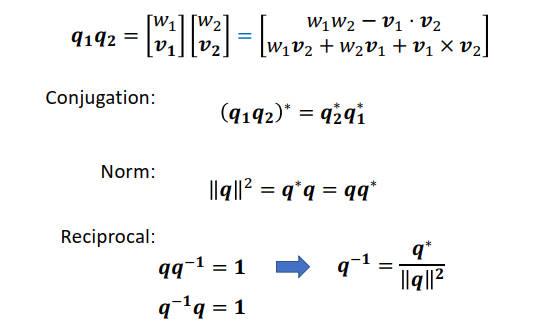
两个旋转相乘及其相关的运算:
四元数的四个元素的物理含义可以和旋转轴、角联系起来:
q=⎣⎡wxyz⎦⎤=⎣⎡cos2θu.xsin2θu.ysin2θu.zsin2θ⎦⎤ 通过下面的公式就可以实现四元数对一个三维向量的旋转:
[0p′]=q[0p]q∗=(−q)[0p](−q∗) q 和 −q 表示的是同一个旋转。
对于多次旋转,有:
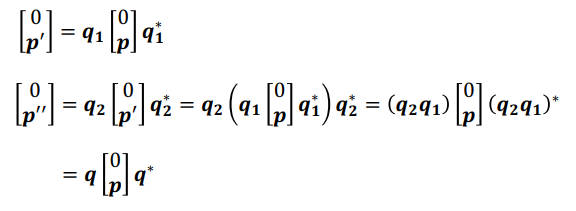
所以四元数是左乘,和矩阵一样。并且四元数可以线性插值。