[GPU Gems 3笔记] Part V-1: Real-Time Rigid Body Simulation on GPUs
刚体模拟基础
刚体运动主要包括位移和旋转两个部分。其中位移非常简单,就是质心的移动。当一个力作用在一个刚体上,这会引起其动量(linear momentum)的变化,具体地:
根据动量可以获得速度:
关于旋转,这个力作用在刚体上同样也会带来角动量(angular momentum)的变化,具体地:
其中是力的作用点和质心的相对位置。
根据角动量可以获得角速度:
其中是刚体在时间t的惯性张量,它是一个的矩阵。惯性张量是会随着刚体的姿态变化的,所以我们需要在每一个仿真步长对其进行更新。而具体到每个时间t的惯性张量的力,可以用下式得到:
其中是时间t时旋转矩阵,一般来说我们会使用四元数来存储旋转,所以这一步需要一些转换。而四元数的计算可以由角速度得到:
其中是旋转轴,是旋转角。
刚体形状表达
为了加速碰撞运算,本文选择使用一系列粒子来表示刚体。
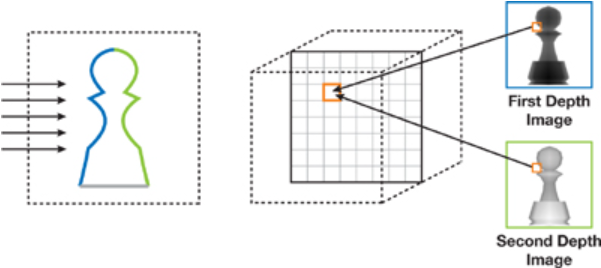
具体做法:首先使用3D体素来近似的表示这个rigidbody(通过划分3D网格),然后在每一个体素放一个粒子。这个生成过程可以在GPU中进行加速,首先打一组平行光到刚体上,光线到刚体上的第一个交点构成了一个深度图,第二个交点构成了第二个深度图。那么很明显第一个深度图就表示刚体正面,第二个深度图表示刚体的反面。那么我们将体素作为输入,通过检测这些体素的深度,哪些体素的深度在两个深度图之间,哪些体素就在刚体内,那么就可以在这里生成一个粒子。
碰撞检测
将刚体用粒子进行表示之后,碰撞检测就被简化为了粒子之间的碰撞检测。这样有一个好处就是碰撞检测很简单,另一个好处就是碰撞检测的精度和速度都是可控的,如果要更大的精度,就可以调小粒子半径,如果要更快的速度就可以用更大的粒子半径。
另一方面,可以使用空间哈希来进行优化,通过选择合适的网格大小,能够让计算效率最大化,一般来说网格的边长是粒子的半径的两倍。
碰撞响应
粒子之间的碰撞力使用离散元(DEM)方法计算得到,这是一种用于计算颗粒材料的方法。粒子之间的斥力由一个线性弹簧进行模拟,阻尼力用一个阻尼器来进行模拟。对于一组碰撞粒子i和j,这些力的计算方法如下:
其中的分别是弹簧弹性系数,阻尼系数,粒子直径,粒子的相对位置和相对速度。 同时还可以模拟剪切力,它与相对切向速度成正比:
其中这个相对切向速度的计算方法为:
通过将力累积就可以获得作用与当前刚体的碰撞力和力矩:
其中是当前粒子i相对刚体质心的相对位置。
GPU上的刚体模拟
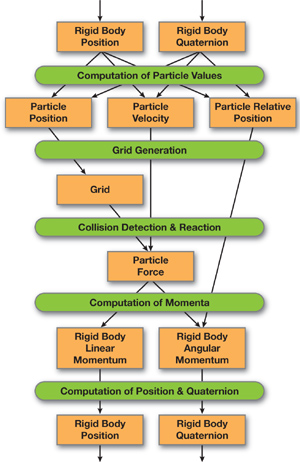
具体算法的流程图如上,主要包括:
- Computation of particle values
- Grid generation
- Collision detection and reaction
- Computation of momenta
- Computation of position and quaternion
其中大部分工作都是内存排不相关的处理,暂不做过多了解。
应用场景
- 用于模拟颗粒材料,力直接驱动粒子的位移
- 流体模拟,加速SPH的粒子邻近搜索
- 流固耦合