UE的碰撞与检测
碰撞检测
碰撞检测设置
在 UE 中,每个参与碰撞的物体都包含了两个属性:碰撞通道(Object/Trace Channel)以及其与其他 Channel 之间的交互类型,交互类型可以分为三类:
- Ignore-可穿透且无任何事件通知
- Overlap-可穿透且有事件通知
- Block-不可穿透且有事件通知
其中交互类型是一张表,在 UE 中叫做 Preset,其中记录了当前这个物体和各种通道的物体之间是Ignore、Overlap还是Block。
发生碰撞的两个物体,只要有一个物体将碰撞对向的类型设置为 Ignore,那么就不会触发任何事件和物理现象。如果两个碰撞对象都互相将对方设置为 Block 时,就会产生物理上的阻隔。其他情况下则都是 Overlap,仅会产生事件,但是不会阻隔。
另外,Preset 中还有一个选项以确认启用碰撞的类型,有四类:
- No Collision(没有碰撞):在物理引擎中此形体将不具有任何表示。不可用于空间查询(光线投射、Sweep、重叠)或模拟(刚体、约束)。此设置可提供最佳性能,尤其是对于移动对象。
- Query Only(仅查询无物理碰撞):此形体仅可用于空间查询(光线投射、Sweep和重叠)。不可用于模拟(刚体、约束)。对于角色运动和不需要物理模拟的对象,此设置非常有用。通过缩小物理模拟树中的数据来实现一些性能提升。
- Physics Only(仅碰撞无物理查询):此形体仅可用于物理模拟(刚体、约束)。不可用于空间查询(光线投射、Sweep、重叠)。对于角色上不需要按骨骼进行检测的模拟次级运动,此设置非常有用。通过缩小查询树中的数据来实现一些性能提升。
- Collision Enabled(启用碰撞物理和查询):此形体可用于空间查询(光线投射、Sweep、重叠)和模拟(刚体、约束)。
碰撞检测方法
UE 中的碰撞检测主要分为三层:
- World 层:最靠近业务需求的层次,已搭建好的物理系统环境,并提供一系列可直接调用的接口
- Interface 层:也是接口封装层,对下封装好第三方物理插件,并负责搭建好物理系统环境
- Plugin 层:具体的物理引擎插件,例如 UE4 的 PhysX、UE5 的 Chaos 等等
主要使用的就是 World 层的接口。
- 射线碰撞检测
UE中的射线查询主要使用 UWorld::LineTraceSingleByChannel 和 UWorld::LineTraceSingleByObjectType 函数进行。 其中前者通过 Trace Channel 进行查询,后者通过 Object Type(也就是 Object Channel)进行查询。
除了打射线,还可以打具有形状的射线(Sphere、Box、Capsule等等)。
- 重叠碰撞检测
一般使用 UWorld::OverlapMultiByChannel 函数。函数中要求输入一个 FCollisionShape,FCollisionShape 一般支持 Sphere、Capsule、Box 和 Line,个人一般用Box。函数能够检测得到与该 CollisionShape 重叠的碰撞物,以 FOverlapResult 的形式返回。
检测到以后,那么就可以通过 FHitResult/FOverlapResult 的 GetComponent() 函数拿到碰撞体的 PrimitiveComponent。再通过 PrimitiveComponent 的 GetBodyInstance 函数拿到碰撞体的实例 BodyInstance。
碰撞体
我们可以从外部导入 Mesh 的碰撞体,也可以在 UE 中为导入的 Mesh 自动生成可用于游戏的碰撞体。这种自动生成的碰撞体分为两种,简单碰撞体和复杂碰撞体。
简单碰撞体
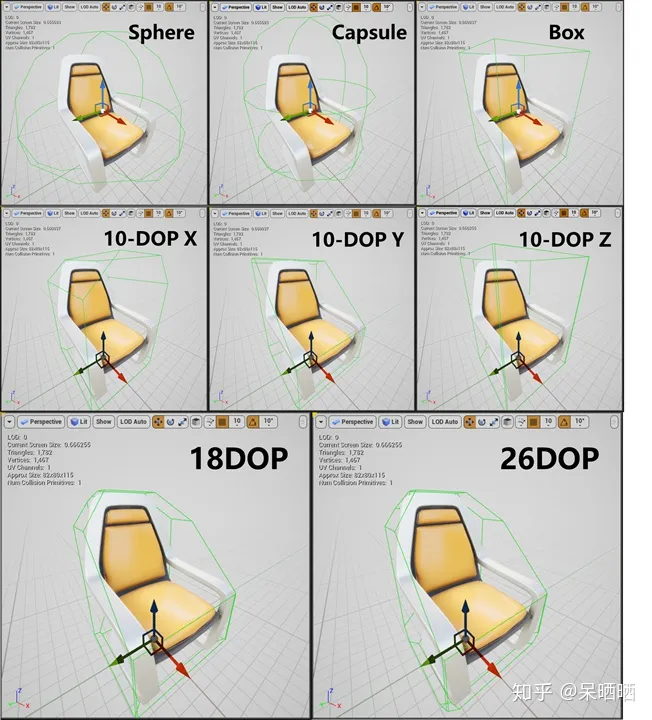
简单碰撞体就是用基础形状(Box、Sphere、Capsule、Convex Shape 等等)来定义物体边界的 Collision Mesh。除了这些基本形状,还有一种名为KDOP(K Discrete Oriented Polytope,K-离散有向多面体)的简单碰撞体。这种碰撞体会生成K组轴对称的平面,并将其形状尽可能地贴近所选的Mesh。
另外还可以使用凸包分解(Auto Convex Collision)来生成凸包体碰撞体。
除了在引擎重生成,还可以从外部导入自定义碰撞体,这个时候需要遵循一定的命名规范:
- UBX_[Mesh Name]: Box 碰撞体
- USP_[Mesh Name]: Sphere 碰撞体
- UCX_[Mesh Name]: Convex Shape 碰撞体
将这些符合命名规范的碰撞体和 Mesh 一起导出为 FBX,然后导入到引擎中。导入后,UE 会找到碰撞体,将其与实际的 Mesh 分离,并转换为 Collision Mesh。
复杂碰撞体
复杂碰撞体即该 Mesh 本身。在 StaticMesh 编辑器的细节面板中,我们可以在 Collision->Collision Complexity 中对引擎生成碰撞体的复杂度进行设置,以便进行不同精度的碰撞查询,共有四个选项:
- Project Default-项目默认设置,在 Project Setting->Engine->Physics->Simulation 中可以找到
- Simple And Complex-同时生成简单碰撞体和复杂碰撞体。简单碰撞体用于常规的场景查询和碰撞测试;复杂碰撞体用于复杂场景查询。
- Use Simple Collision As Complex-仅创建简单碰撞体,用于场景查询以及碰撞测试。
- Use Complex Collision As Simple-仅创建复杂碰撞体,用于场景查询以及碰撞测试。但此时无法对其进行模拟。